近日,yl23455永利官网许丽佳教授团队在农业机器人路径规划领域取得突破,分别在农林科学权威期刊(Top一区)《Computers and Electronics in Agriculture》和计算机科学权威期刊(Top一区)《Expert Systems with Applications》发表题为《Path planning for mobile robots in greenhouse orchards based on improved A* and fuzzy DWA algorithms》和题为《Hybrid path planning algorithm for robots based on modified golden jackal optimization method and dynamic window method》的研究论文。这两篇论文对于农业机器人路径规划的发展具有重要作用,为农业机器人在实际应用中提供了更加可靠的路径规划解决方案,并为机器人在复杂环境中的高效导航提供了强有力的技术支持。
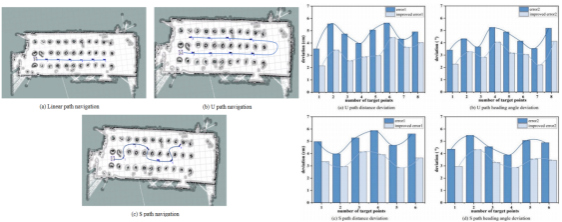
图1 改进A*和FDWA算法路径规划实验及误差数据对比图
随着农业自动化和智能化的快速发展,开发高效、可靠的路径规划算法对于农业机器人能够自主避障、精确执行任务至关重要。许丽佳教授团队创新性地提出了一种融合改进A*算法和模糊动态窗口算法(FDWA)的路径规划算法,旨在解决温室果园机器人路径规划问题。该算法优化了传统A*算法的评价函数、搜索策略和路径平滑度,并将模糊逻辑控制与传统DWA算法相结合。实验结果表明,该融合算法显著提升了机器人路径规划的效率与准确性,距离误差减少31.8%、航向角误差减少28.6%、安全距离增加了30%。此外,团队还针对高密度、不规则障碍物的大规模场景,提出了一种将Golden Jackal Optimization(MGJO)算法与改进动态窗口法(IDWA)相结合的混合路径规划算法。在三种不同环境下,MGJO算法的平均路径长度比原算法分别提高了10.76%、16.72%和25.46%。
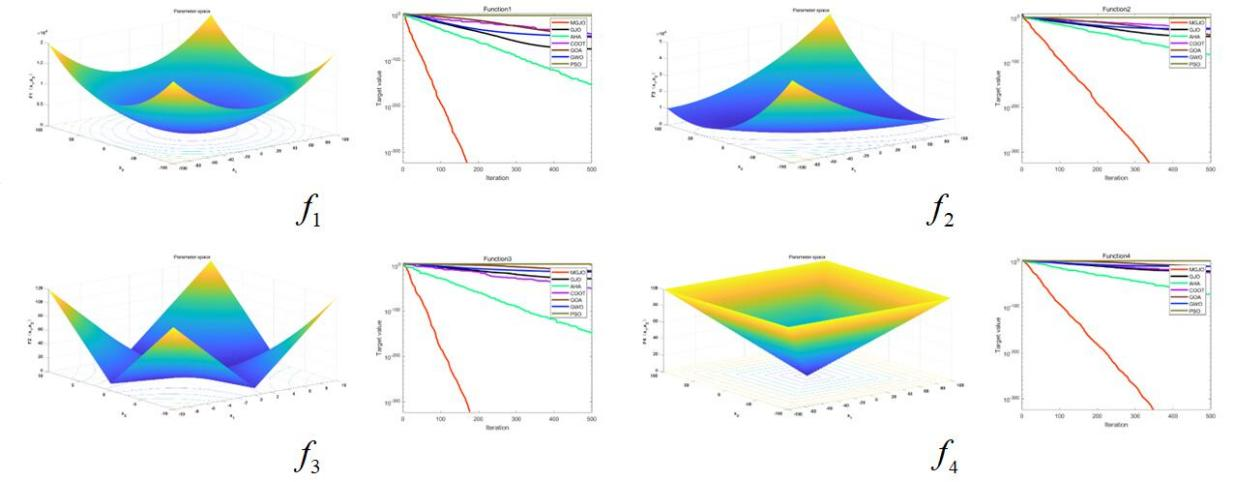
图2 MGJO算法基准测试函数仿真图
《Path planning for mobile robots in greenhouse orchards based on improved A* and fuzzy DWA algorithms》以王玉超教授和硕士研究生符春海为共同第一作者,许丽佳教授为通讯作者。《Hybrid path planning algorithm for robots based on modified golden jackal optimization method and dynamic window method》以王玉超教授和硕士研究生童科淋为共同第一作者,许丽佳教授为通讯作者。两篇论文以永利官网地址为第一署名单位和唯一通讯单位,合作单位包括浙江大学。据了解,上述研究得到了四川省科技厅项目(22ZDYF0095)的资助。
论文网址:
https://doi.org/10.1016/j.compag.2024.109598
https://www.sciencedirect.com/science/article/pii/S0957417425014307?dgcid=coauthor






